
In 2021, ARRB announced the CAV Readiness project in collaboration with iMOVE Australia called the iSCAN project [2]. This project aims to establish a new automated probe vehicle as a testbed to enable applied research by the ARRB Mobility Future team to deploy CAVs in Australia.
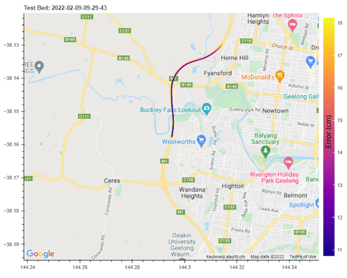

Figure 1: Localisation capability: Localisation error (colour bar) is overlayed on the map (left) and perception capability (right) developed in the iSCAN project.
ARRB is responding to the growing global autonomous vehicle market, which is projected to be valued at $2,161.79 billion by 2030 [1]. The technology is advancing rapidly, and Australia is ready to adopt it [3]. Achieving high safety standards is the key to deployment in Australia, and it is imperative to identify the scenarios where this state-of-art technology can fail, under Australian circumstances. Especially given that the leading technologies are developed in the US and Europe. Key areas that ARRB is focused on include:
- Perception and Prediction: an infallible perception and prediction system is the only way to safely deploy automated vehicles [4]. Perception is how the car sees its surroundings using sensors. Prediction is anticipating the actions of surrounding entities such as other cars, pedestrians etc. Perception and Prediction are undeniably the most challenging part of automation. ARRB is using the open-source model/ architecture trained on a diverse dataset to develop our perception and prediction system. However, an infallible system requires more targeted training and millions of miles of driving experience (real-world or custom-built simulation). The training data should contain scenarios that are Australian specific – Melbourne hook turns, long road rails, negotiating roads with massive mining equipment on low loaders, etc. Additionally, the prediction on distinctive Australian wildlife like kangaroos is also under-explored, and if you live in Canberra, you know how many Kangaroos there are even in urban environments.
- Localisation: Mapping localisation performance is a complex task for Australia due to its vast geography. ARRBs system has displayed impressive accuracy for localisation. However, it is necessary to spatially map localisation accuracies to discover the location where performance is poor. Poor localisation performance translates to hazardous spots for automation and henceforth essential to investigate. ARRB has developed a system that records accurate localisation data with the IMU+GNSS[1] sensor fusion system. Furthermore, the system also captures high-resolution LiDAR[2] data and depth images. This advance data can be used to build a digital map and localise the vehicle in that map simultaneously.

Figure 2: First on-road testing of iSCAN vehicle for data collection
With the advance automated probe vehicle retrofitted with state of the art hardware and leader in road survey digital data, ARRB is currently evolving perception systems specific to the Australian landscape and mapping performance of localisation to develop next-generation mapping systems. The formal updates of the project can be found here [5]. For more information about the project and capabilities of the team, contact Renata Berglas, Mobility Future Business Leader, ARRB.
[1] IMU: Inertial Measurement Unit, GNSS: Global Navigation Satellite System
[2] Lidar: Light Detection and Ranging
References
[1] “Autonomous Vehicle Market Size, Share, Value, Report, Growth,” Allied Market Research. https://www.alliedmarketresearch.com/autonomous-vehicle-market (accessed Mar. 24, 2022).
[2] A. R. R. Board, “Making Australia driverless ready with ARRB and iMOVE.” https://www.arrb.com.au/news/making-australia-driverless-ready-with-arrb-and-imove (accessed Mar. 24, 2022).
[3] “Automated vehicle program.” https://www.ntc.gov.au/transport-reform/automated-vehicle-program (accessed Mar. 24, 2022).
[4] K. Gremillion, “Perception Algorithms Are the Key to Autonomous Vehicles Safety | Ansys,” 2020. https://www.ansys.com/blog/perception-algorithms-autonomous-vehicles (accessed Mar. 24, 2022).
[5] S. writers, “Australian CAV readiness: Integrating a data probe vehicle,” iMOVE Australia | Transport R&D, May 12, 2021. https://imoveaustralia.com/project/australian-cav-readiness-integrating-data-probe-vehicle/ (accessed Mar. 24, 2022).